Autonomous Control & 3D Vision of a RC Helicopter
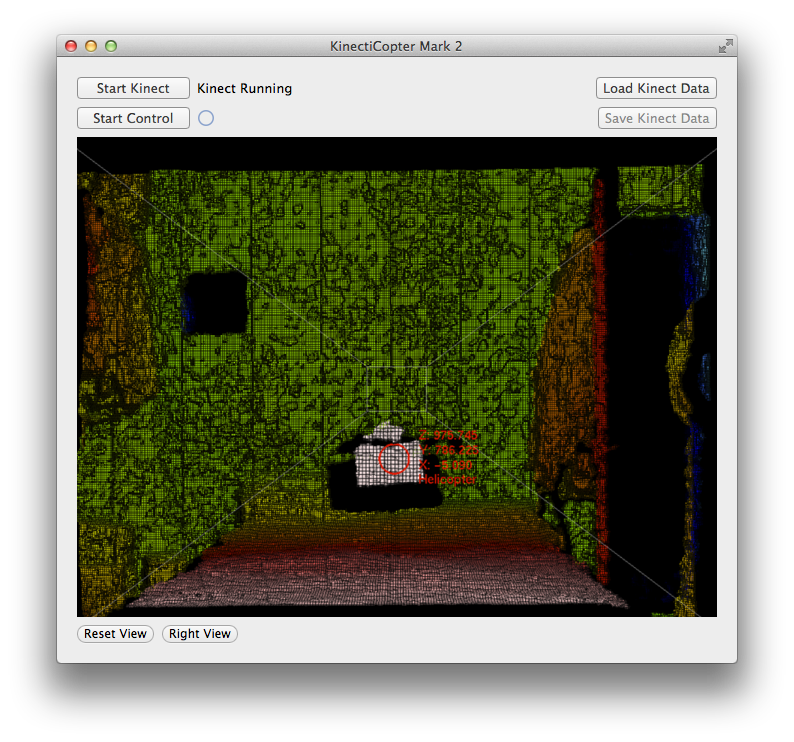
For my 3rd year engineering project at university, I developed a system using my Mac, an Arduino and a Kinect which could autonomously fly a small RC helicopter around a room.
This took a lot of work, but worked awesomly in the end! I was able to create a system that allowed the helicopter to hover at a height of 1 metre off the floor, and centre relative to the Kinect camera.